Nissan LEAF 2023 Manuali per proprietari
9.17.8.2. Limitazioni del sistema IEB con rilevamento pedone

Di seguito sono elencate le limitazioni del sistema IEB. Se il veicolo non viene utilizzato conformemente a queste limitazioni di sistema, si potrebbero causare gravi lesioni o morte.
Il sistema IEB non è in grado di rilevare tutti i veicoli o tutti i pedoni in tutte le condizioni.
Il sistema IEB non è in grado di rilevare quanto segue:
Pedoni di piccola statura (per esempio, bambini), in posizione seduta, azionando giocattoli/usando skateboard, sullo scooter o nella sedia a rotelle, oppure in una posizione diversa da quella in piedi o di camminata.
Animali di qualunque dimensione.
Ostacoli (per esempio, merci o rottami) sulla carreggiata o sul ciglio della strada.
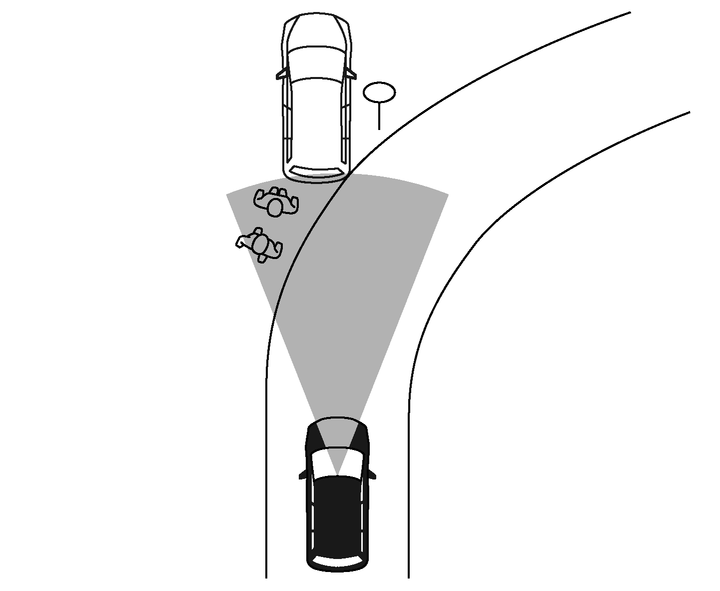
Veicoli provenienti dalla direzione opposta o che attraversano.
Veicoli con gli pneumatici difficilmente individuabili, oppure la forma del lato posteriore del veicolo è poco chiara o ostruita.
Veicoli parcheggiati.
Le prestazioni del sistema IEB sono piuttosto limitate.
Se lungo la traiettoria del veicolo si trova un veicolo fermo e il veicolo viaggia a velocità superiori a circa 80 km/h (50 miglia/h), il sistema IEB non entrerà in funzione.
Il rilevamento dei pedoni non funziona quando il veicolo viaggia a velocità superiori a circa 60 km/h (37 miglia/h) o inferiori a circa 10 km/h (6 miglia/h).
In caso di rilevamento di un pedone, il sistema IEB non fornirà il primo avviso.
Il sistema IEB potrebbe non funzionare correttamente o non essere in grado di rilevare un veicolo o un pedone davanti nelle condizioni seguenti:
In condizioni di scarsa visibilità (ad esempio, pioggia, neve, nebbia, tempeste di polvere, tempeste di sabbia, fumo e spruzzi dalla superficie stradale).
Se sporco, ghiaccio, neve, nebbia o altro materiale copre l’area del sensore radar o l’area della telecamera sul parabrezza.
Se una forte luce (per esempio, la luce del sole o gli abbaglianti) entra nella telecamera anteriore o se si verifica un’improvvisa variazione della luminosità (per esempio, entrando in una galleria o in caso di un fulmine).
In condizioni di oscurità o scarsa illuminazione, per esempio di notte o all’interno di una galleria, compresi i casi in cui i fari del veicolo sono spenti o abbassati, oppure i fanali posteriori del veicolo che precede sono spenti.
Quando la direzione della telecamera non è allineata correttamente.
Quando si guida su una ripida discesa, su strade con le curve strette, e/o su strade accidentate o sterrate.
In presenza di interferenze prodotte da altre sorgenti radar.
Quando la posizione o il movimento del proprio veicolo cambia velocemente o significativamente (per esempio, cambio di corsia, svolta del veicolo, sterzata improvvisa, brusca accelerazione o decelerazione).
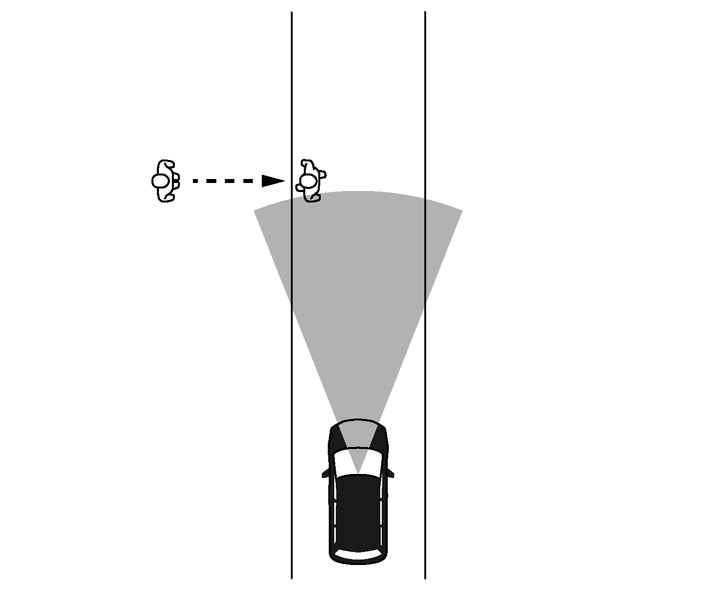
Quando il proprio veicolo oppure il veicolo o pedone davanti si muove velocemente o significativamente, in modo che il sistema non riesca a rilevarlo e reagire in tempo (per esempio, un pedone che avanza velocemente verso il veicolo a distanza ravvicinata, un veicolo che taglia la strada, cambiando corsia, facendo un’inversione di marcia, sterzando improvvisamente, accelerando o decelerando bruscamente).
Quando il veicolo o pedone devia dal percorso in avanti del veicolo.
Se la differenza di velocità tra i due veicoli è lieve.
Il profilo del pedone è in parte nascosto o non individuabile; per esempio, dovuto al fatto che sta portando bagagli, spingendo una carrozzina, indossando indumenti o accessori voluminosi o larghi, o assumendo una postura unica (ad esempio alzando le mani).
In presenza di uno scarso contrasto tra la persona e lo sfondo, ad esempio quando indossa vestiti con colori o disegni simili a quelli dello sfondo.
Per circa 15 secondi dopo aver avviato il sistema EV.
Se il veicolo davanti ha una forma unica o insolita, altezze libere estremamente basse o alte, un carico merci inusuale, o quando è stretto (per esempio, una motocicletta).
Quando il veicolo o pedone si trova vicino a un segnale stradale, una superficie riflettente (per esempio, acqua presente sulla strada), oppure all’ombra.
Quando sono raggruppati più pedoni.
Quando la vista del pedone è ostruita da un veicolo o altro oggetto.
L'efficacia del sistema potrebbero peggiorare nelle condizioni seguenti:
Quando il veicolo viene guidato su una strada dal fondo sdrucciolevole.
Il veicolo è guidato su una strada in pendenza.
Carichi eccessivamente pesanti sono sistemati sul sedile posteriore o nel vano bagagli del veicolo.
Il sistema è progettato per controllare automaticamente la funzionalità del sensore (radar e telecamera), entro certi limiti. Il sistema potrebbe non essere in grado di rilevare alcuni tipi di ostruzione dell'area del sensore, come per esempio ghiaccio, neve o adesivi. In questa circostanza il sistema potrebbe non essere in grado di avvisare adeguatamente il conducente. Controllare, pulire e liberare regolarmente le aree del sensore.
In alcune condizioni di fondo stradale e traffico, il sistema IEB potrebbe inaspettatamente applicare parzialmente i freni. Quando è necessario accelerare, premere il pedale dell'acceleratore per disabilitare il sistema.
Il sistema IEB potrebbe entrare in funzione quando rileva un disegno, oggetto, ombra o luci simili al profilo di un veicolo, pedone o se hanno le stesse dimensioni e si trovano alla stessa posizione dei fanali posteriori di un veicolo.
Il sistema potrebbe continuare a funzionare se il veicolo che precede gira a destra o sinistra.
Il sistema potrebbe entrare in funzione quando il proprio veicolo si avvicina a e sorpassa il veicolo che precede.
A seconda della forma della strada (strada curva, ingresso e uscita della curva, strada tortuosa, corsia regolata, lavori in corso, ecc.), il sistema potrebbe entrare in funzione temporaneamente per il veicolo che proviene dalla direzione opposta davanti al proprio veicolo.
Il sistema IEB potrebbe reagire alla presenza di:
oggetti sul ciglio della strada (segnali stradali, guardrail, pedoni, veicoli e così via)
oggetti che si trovano sopra la strada (un ponte basso, segnali stradali e così via)
oggetti sul fondo stradale (binari ferroviari, griglie di scolo, piastre d’acciaio e così via)
oggetti in un parcheggio (travi, pilastri e così via)
pedoni o motociclette che si avvicinano alla corsia di marcia
veicoli, pedoni o oggetti presenti nelle corsie adiacenti o vicini al veicolo
Pedoni in arrivo
oggetti presenti sulla carreggiata (quali alberi)
Un pedone si avvicina alla corsia di marcia davanti al veicolo.
Gli spazi di frenata aumentano su fondo sdrucciolevole.
Rumori eccessivi possono interferire con il segnale acustico, coprendone il suono.
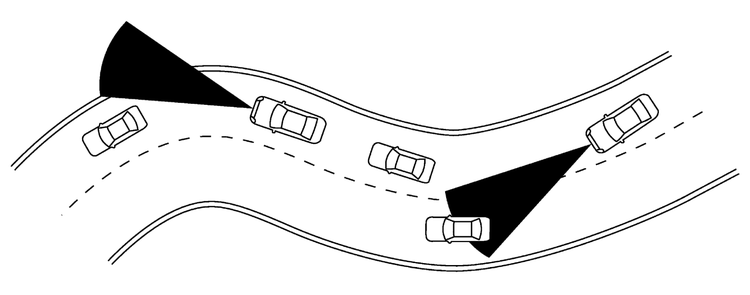
Quando si viaggia su determinate strade, come le strade tortuose, collinose, curve, strette o le strade in costruzione, il sensore potrebbe rilevare veicoli presenti sull'altra corsia, o potrebbe temporaneamente non essere in grado di rilevare un veicolo che precede. Questa condizione potrebbe essere causa di un funzionamento improprio del sistema.
La capacità di rilevamento veicoli può anche essere condizionata dal funzionamento del veicolo (manovre di sterzata o posizione di marcia all’interno della corsia, ecc.) o dalle condizioni del veicolo. In questo caso, il sistema potrebbe avvisarvi inaspettatamente mediante il lampeggiamento della spia del sistema e l'emissione del segnale acustico. Sarà necessario dover correggere manualmente la distanza dal veicolo che precede.